Xiaoyang Guo, Hongsheng Li, Shuai Yi, Jimmy S. Ren, Xiaogang Wang
The European Conference on Computer Vision (ECCV), 2018
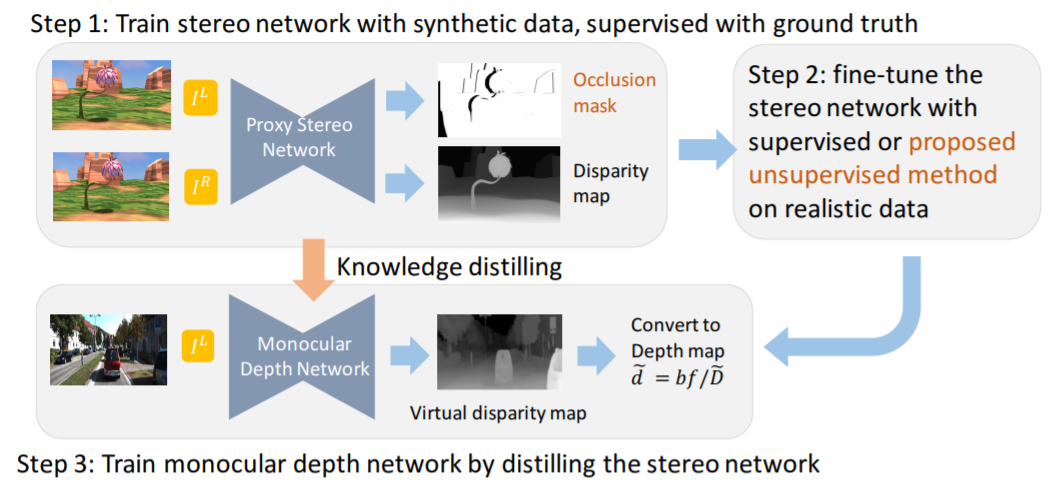
Monocular depth estimation aims at estimating a pixelwise depth map for a single image, which has wide applications in scene understanding and autonomous driving. Existing supervised and unsupervised methods face great challenges. Supervised methods require large amounts of depth measurement data, which are generally difficult to obtain, while unsupervised methods are usually limited in estimation accuracy. Synthetic data generated by graphics engines provide a possible solution for collecting large amounts of depth data. However, the large domain gaps between synthetic and realistic data make directly training with them challenging. In this paper, we propose to use the stereo matching network as a proxy to learn depth from synthetic data and use predicted stereo disparity maps for supervising the monocular depth estimation network. Cross-domain synthetic data could be fully utilized in this novel framework. Different strategies are proposed to ensure learned depth perception capability well transferred across different domains. Our extensive experiments show state-of-the-art results of monocular depth estimation on KITTI dataset.